


Research Theme
North Korea has threatened South Korea through the use of unmanned micro-flight vehicles that cannot be detected by existing radar.
In America and Japan, unmanned vehicles were caught in national office . Currently, due to the rapid development of UAVs, anyone can purchase UAVs, which can be armed with small bombs or chemical weapons, making these drones extremely dangerous. Accordingly, a technique to detect UAVs, which have small RCS and slow velocity, is acutely required. Existing radar detection systems are unsuitable for Korea’s mountainous terrain, so a detection system for such terrains is urgently needed.
Research Topics
- FMCW radar system
- Passive radar system
- Real-time UAV trace algorithm and visualization
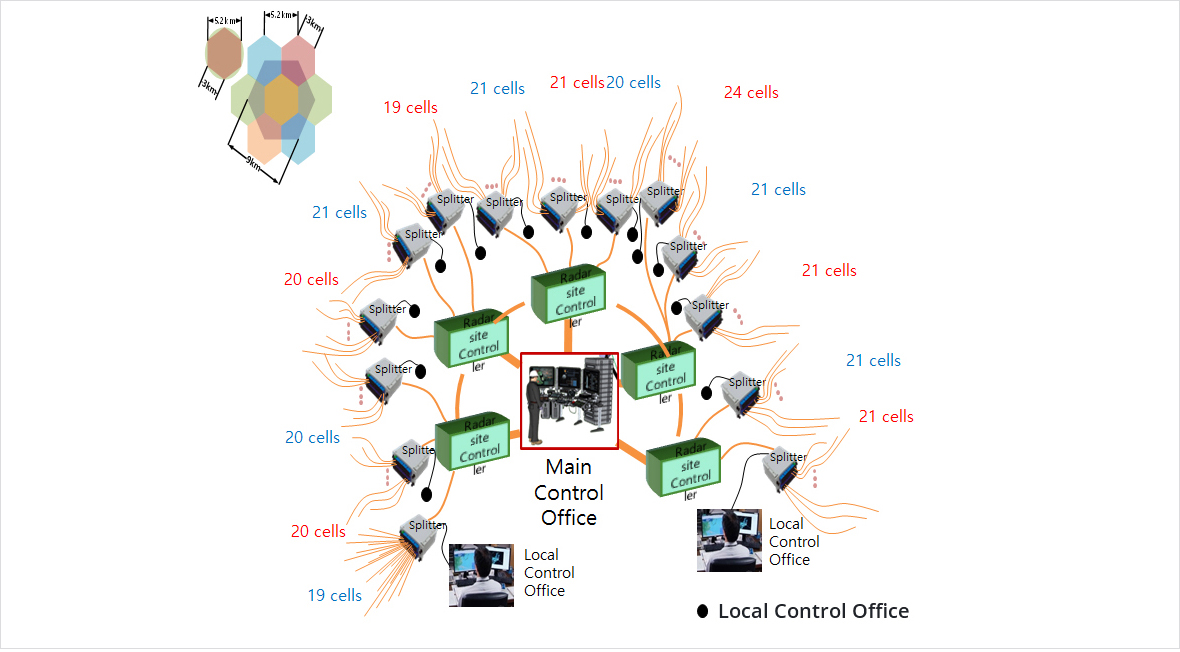
- Optic networks
- Enemy UAV characteristic analysis
Key Technology
- UAV detection by applying ambiguity function
- Synchronization for FMCW radar system
- Multi-measurement modeling extended by super-resolution model for radar model
- Real-time tracing technology realized by Time of Arrival (TOA), Frequency of Arrival (FOA), and Extended Kalman filter (EKF)
- Realization of an IFoF-based wavelength division multiplex passive optic network
- Visualization engine development of UAV tracing
- Target shape extraction with active contour method and multi-radar network
- Real-time embedded system for UAV radar detection
- Optimization of radar network for passive UAV detection system