


Fundamental Research on Future Robotics
Our research aims to develop real-time operating systems to control humanoid robots with primary focus on the following:
- A humanoid robot is composed of various devices including motor controllers and sensors, so it is necessary to develop techniques to control these devices simultaneously.
- The size and power consumption of humanoid robots is limited, so their embedded system architecture and algorithms need to be optimized.
- A humanoid robot is a multi-rate system and requires strict real-time capabilities to avoid any unacceptable errors.
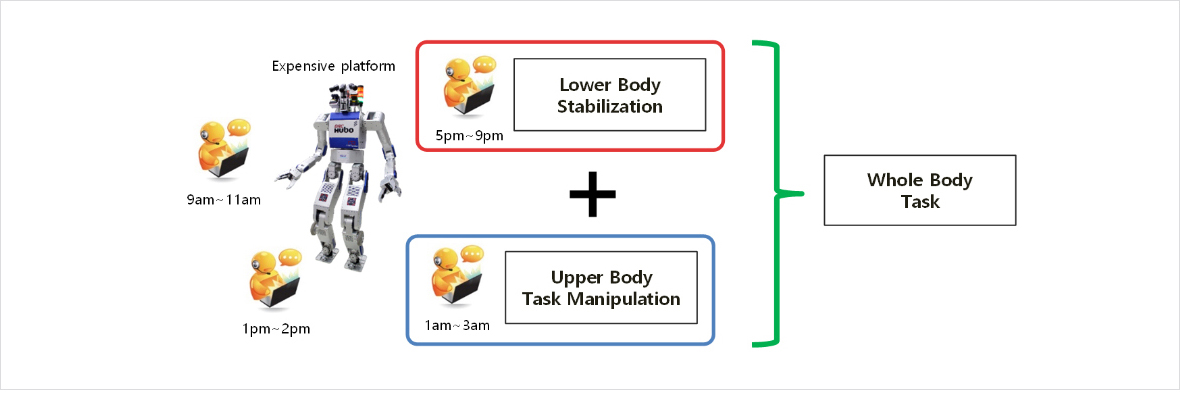
- Humanoids are an expensive robot platform compared to other robot hardware platforms. We are going to propose a basic framework to make humanoid robots more accessible to researchers and developers.
Research Topics
- Sensors and Drives
- Development of techniques to control several robot devices including motor controllers and sensors
- Signal processing for sensor signal fusion - Software Framework
- Development of a software framework based on an embedded system
- Development of a software structure with which several researcher can progress programming - Real Time OS
- Realization of a strict hard real-time controlling system between the main controller and devices - Communications
- Inter-agent communication techniques including CAN and EtherCat
Key Technology
- Real-time robot operating system
- Simultaneous device control
- Software structure optimization
- Simultaneous development
- Basic development framework